自動制御
1. 制御系
(1) シーケンス制御(開ループ制御)
あらかじめ定められた順序・条件に従って、一連の動作を逐次進める操作。
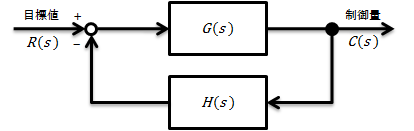
(2) フィードバック制御(閉ループ制御)
制御の結果である制御量を測定し、目標値と比較して偏差があれば、制御入力を修正する操作。

2. ラプラス変換
(1) ラプラス変換表
|
時間関数 |
ラプラス変換 |
|
単位インパルス関数 |
1 |
|
単位ステップ関数 |
|
|
ランプ関数 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) 変換の法則
|
時間関数 |
ラプラス変換 |
|
導関数 |
|
|
積分関数 |
|
|
推移定理 |
|
|
初期値定理 |
|
|
最終値定理 |
|
初期値定理により、初期値![]() と0近傍の傾き
と0近傍の傾き ![]() が求まる。
が求まる。
最終値定理により、定常値![]() が求まる。フィードバック系の定常偏差を求めるときに使う。
が求まる。フィードバック系の定常偏差を求めるときに使う。
3. 伝達関数とブロック線図
全て初期値を0、伝達要素が平衡状態とした場合の、入力信号のラプラス変換に対する、出力信号のラプラス変換を伝達関数という。
![]()
(1) 伝達要素
|
伝達要素 |
伝達関数 |
|
比例要素(P動作) |
|
|
積分要素(I動作) |
|
|
微分要素(D動作) |
|
|
一次遅れ要素 |
|
|
二次遅れ要素 |
|
K :比例ゲイン、TI :積分時間、TD :微分時間
ξ :減衰係数、ωn :固有角周波数
(2) ブロック線図の等価変換
|
結合方式 |
等価変換 |
|
直列結合 |
|
|
並列結合 |
|
|
フィードバック結合 |
|
※ フィードバック結合
![]()
4. 周波数伝達関数
入力信号が正弦波交流である場合の伝達関数![]() を、周波数伝達関数呼ぶ。
を、周波数伝達関数呼ぶ。
![]()
![]() が最大となる時の値を共振値、この時の各周波数
が最大となる時の値を共振値、この時の各周波数![]() を共振角周波数という。
を共振角周波数という。
共振値が大きいほど応答は速いが、安定度が悪くなる。
(1) 絶対値と位相
① ゲイン(振幅比)
![]()
② 利得
![]()
③ 位相角
![]()
(2) ベクトル軌跡(ナイキスト線図)
周波数伝達関数のω=0~∞における変化を、複素平面上に描いた軌跡。
ω=-∞~0は、実軸に対して対称なので、省略される。
原点からの距離が、ゲインを表す。
① 一次遅れ要素
![]()
実部と虚部に分けると、
![]()
![]()
![]()
円を描く。
② 二次遅れ要素
![]()
同様に、実部と虚部に分ける。
(3) ボード線図(ゲイン線図+位相線図)
横軸に![]() に対し、
に対し、
ゲイン線図では、縦軸に利得![]() の変化を描き、
の変化を描き、
位相線図では、縦軸に位相の変化を描く。
5. 安定判別
フィードバック制御系において、フィードバック信号が入力信号より180°遅れの場合、加え合わせ点で二つの信号が重なり振動が拡大され、不安定になってしまう。
開ループ伝達関数(一巡伝達関数):
![]()
閉ループ伝達関数:
![]()
(1) 開ループ伝達関数を使う安定性解析
一巡伝達関数において、位相が-180°の時、ゲインが1よりも小さければ(利得が0dBより小さければ)、安定となる。ゲインが1の時を安定限界という。
① ナイキスト線図による安定判別法
ナイキスト線図が、点(-1,0)を常に左側に見て進めば、系は安定となる。
この時、ベクトル軌跡とy軸との交点を(g , 0)とすると、ゲイン余裕gm は、
![]()
また、ゲインが1の時のベクトル軌跡上のプロットの角度を位相余裕といい、
![]()
② ボード線図による安定判別法
位相余裕は、利得が0dBの時の位相と-180°との差で表わされる。
ゲイン余裕は、位相角が-180°の時の利得と0dBとの差で表わされる。
(2) 閉ループ伝達関数を使う安定性解析
閉ループ伝達関数の特性方程式![]() の係数を用いて判別する。
の係数を用いて判別する。
① 特性方程式による安定判別法
出力に関して部分分数展開し、たとえばステップ入力で特性方程式が二次式の場合には、
![]()
となり、出力の時間関数は、
![]()
系が安定であるためには、指数関数部分が減衰することが必要となる。
そのためには、次の条件のどちらかを満たすこと。
ž a , b が実根である場合は、ともに正であること。
ž a , b が複素根である場合は、両者が共役の関係にあり、ともに実部が正であること(α ± j β において、α>0 )。
② ラウス・フルビッツの安定判別法
特性方程式は、
![]()
系が安定であるためには、次の二つの条件を満たすこと。
ž 係数![]() がすべて正であること。
がすべて正であること。
ž フルビッツ行列式のすべてが正であること。
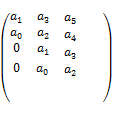
フルビッツ行列:
フルビッツ行列式:

たとえば、特性方程式が三次式の場合には、
![]()
![]()
![]()

6. フィードバック制御系の特性
開ループ伝達関数(一巡伝達関数):
![]()
分母の積分要素 ![]() の次数N によって、0型、1型、2型と分類される。
の次数N によって、0型、1型、2型と分類される。
閉ループ伝達関数:
![]()
(1) 過渡特性
インディシャル応答(単位ステップに対する応答)において、
ž 時間遅れ:応答が定常値の50%に達する時間
ž 立ち上がり時間:応答が定常値の10%に達してから90%に達するまでの時間
ž 整定時間:応答が定常値の5%以内に落ち着く時間
ž 最大オーバシュート:最大行き過ぎ量の定常値に対するパーセント
二次遅れ要素の伝達関数
![]()
において、減衰係数による振動条件は、
① ξ>1:過制動
② ξ=1:臨界制動
③ 0<ξ<1:振動
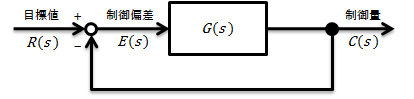
(2) 定常特性
制御偏差:
![]()
一巡伝達関数の積分要素の![]() は分子に来る。
は分子に来る。
定常偏差(オフセット):定常時(t =∞)の残留偏差
![]()
① 定常位置偏差:ステップ入力に対する定常偏差
![]()
1型以上で0
② 定常速度偏差:ランプ入力に対する定常偏差
![]()
2型以上で0
③ 定常加速度偏差:加速度入力に対する定常偏差
![]()
3型以上で0
|
|
定常位置偏差 |
定常速度偏差 |
定常加速度偏差 |
|
0型 |
εp |
∞ |
∞ |
|
1型 |
0 |
εv |
∞ |
|
2型 |
0 |
0 |
εa |
制御系の定常偏差は、型が大きいほど小さくなるが、安定度が悪化する。
2型にすると定常速度偏差を0にできるが、安定度が悪くなるので、一般のサーボ系では1型を採用し、一巡伝達関数![]() のゲインを大きくすることで、定常速度偏差を小さくする。
のゲインを大きくすることで、定常速度偏差を小さくする。
7. フィードバック制御系の設計
(1) 応答の速い制御系
周波数応答法によるサーボ系の設計
① ゲイン補償器
![]()
② 位相進み補償器
![]()
③ 位相遅れ補償器
![]()
(2) 応答の遅い制御系
ステップ応答によるプロセス制御系の設計
![]()
ジーグラ・ニコルスの過渡応答法
PID調整計をフィードバック制御系に組み込むにあたって、3つのパラメータを決める。